

Thursday, July 1, 2010
Power pack!
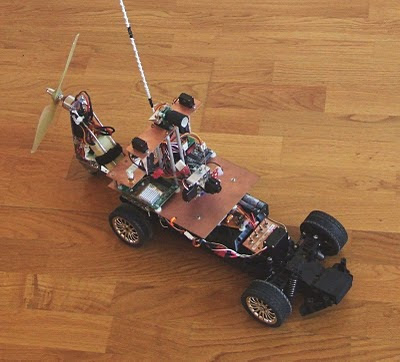
While the rear wheel traction motor provides plenty of power for normal operation, the curiosity of obtaining some extra power through a different propulsion method is appealing. Since I had some parts from a unfinished airplane project, the materialization of another exclusive idea became real: to build a special trailer for the car, with a single purpose - to push the car even faster, with the help of a propeller instead of traction wheels. Featuring a 9x6E propeller, a 150 Watt brushless motor, an 18 A ESC, and a 1300 mAh LiPo battery, this trailer provides the closest one can ever get from raw rocket power, with controller propulsion.
Wednesday, June 2, 2010
Sensors are never too many

While it is important to design a autonomous rover capable of performing even under the worst conditions and with the least available information from the surrounding environment, if we can provide good information, it will certainly lead to better results as long as we have a good software implementation behind it.
Tuesday, May 4, 2010
System override
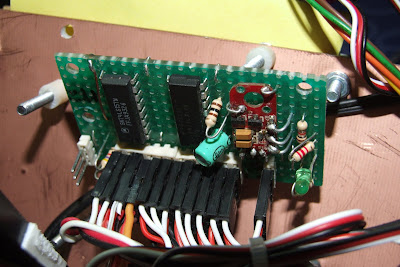
Unlike some other domains, with robot software bugs can have expensive outcomes. In order to avoid unpleasant mishaps, I have decided to implement a hardware solution for preventing software originated problems that could cause a calm, boring robot to become a runaway beast hitting hard against walls, people, animals and anything that is in its way. To achieve this I have built a PWM control source multiplexer:

Subscribe to:
Posts (Atom)